
今日のロボットプログラミングは
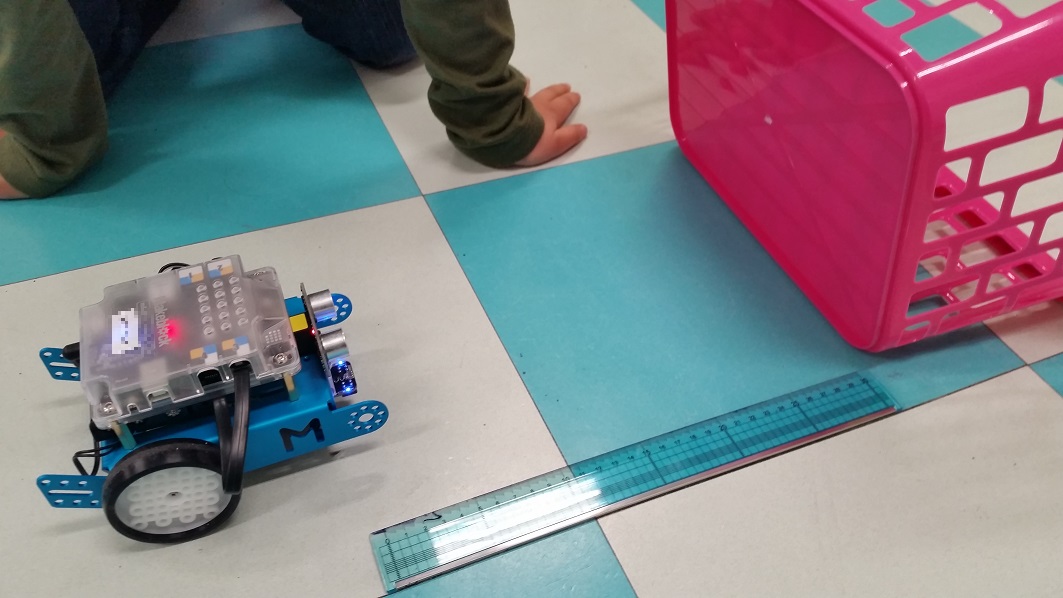
障害物センサーを使って、壁に近づいたら停まるプログラムを作成
障害物までの距離30センチと決めて、
ロボットにプログラミング転送
おし、転送完了!
スイッチオン!!
あれ?動かない?
パソコンに戻ってプログラムを確認・・・。
うーん。動かない。
試しに、ロボットに手をかざすと・・・。
あっ!?動きだした(笑)
条件が逆というオチでした(笑)
でも、この瞬間は他に変えようがない時間ですよねー!
無事、30cmで、ビタ止まりをしました!
止まった瞬間もとっても嬉しい時ですよね!